Typically, the inflow hydrograph used in flood routing is derived by converting a measured stage into discharge using a steady state rating curve (Mutreja, 1986; Perumal and Raju, 1998; Moramarco and Singh, 2001).
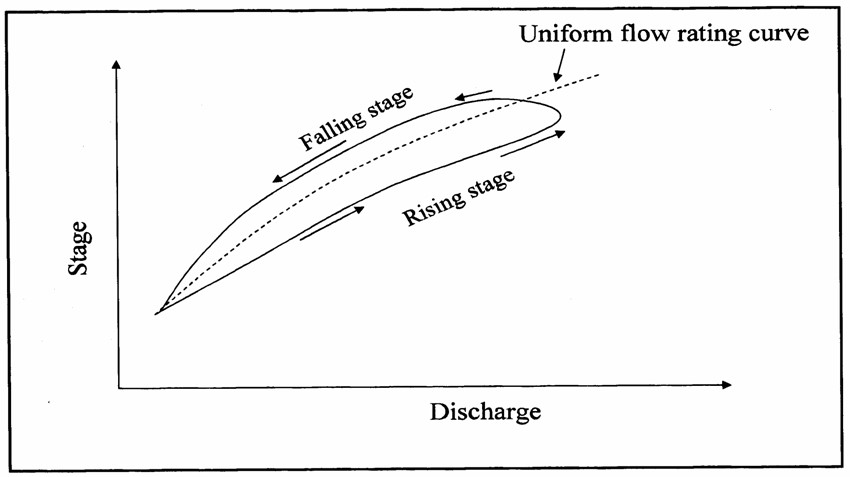
As illustrated by Shaw (1994), storage in a river reach can be categorized into three forms, as depicted in Figure 2.1. During the rising stage of a flood in the reach, when inflow exceeds outflow, wedge storage must be added to prism storage. Conversely, during the falling stage, when inflow is less than outflow, wedge storage is negative and subtracted from prism storage to calculate total temporary storage in the reach. When outflow and inflow are equal in a reach, only prism storage is present in the channel.
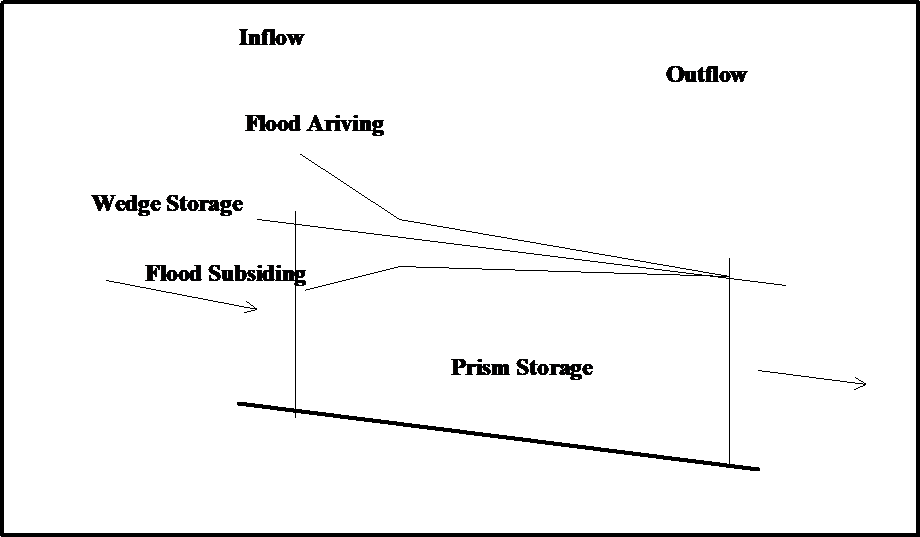
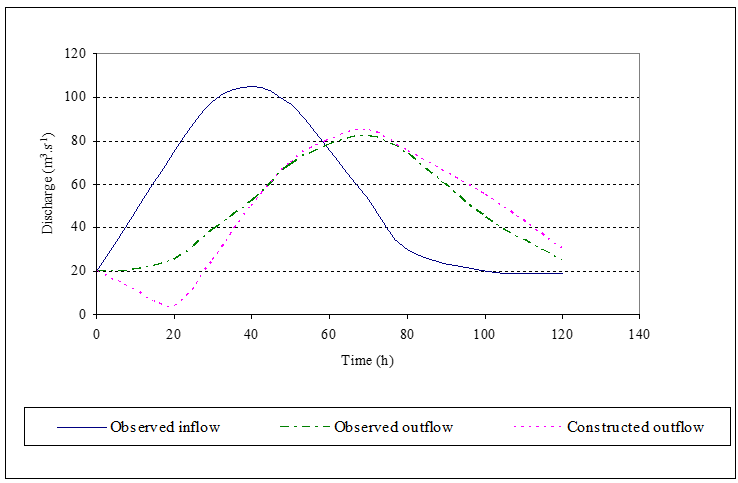
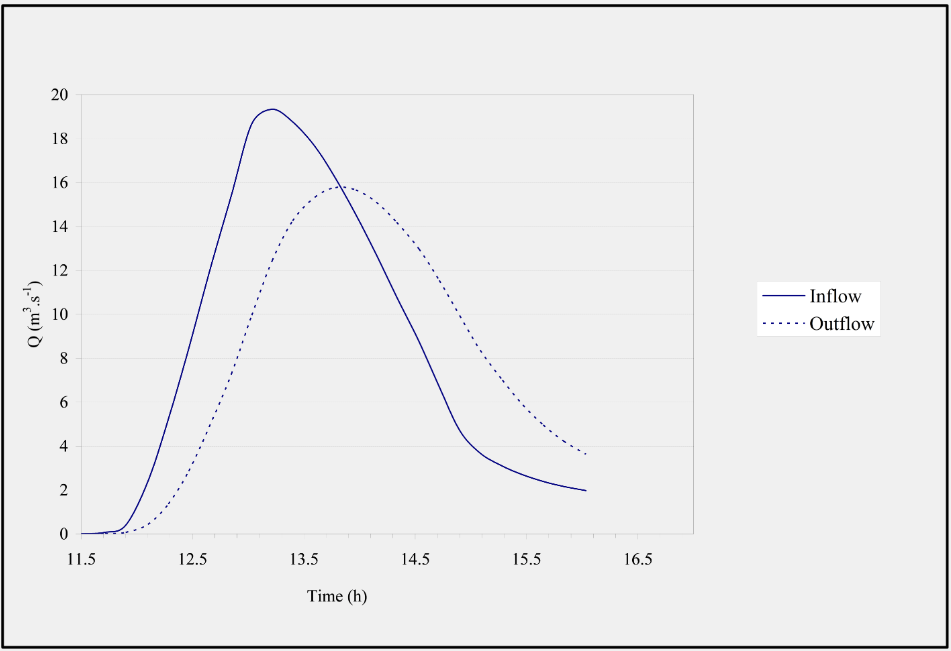
Figure 2.2 illustrates an example of inflow and outflow hydrographs to and from a reach with prism storage. In a river reach characterized by a uniform cross-section and constant slope, velocity remains unchanged, indicating uniform flow (Chow, 1959). In these reaches, the peak of the outflow hydrograph aligns with the recession curve of the inflow hydrograph (Shaw, 1994).
According to Tung (1985) and Fread (1993), the most common form of the linear Muskingum model is expressed as the following equations:
where
| Sp | temporary prism storage [m3] |
|---|---|
| Sw | temporary wedge storage [m3] |
| It | the rate of inflow [m3/s] at time t |
| Qt | outflow [m3/s] at time t |
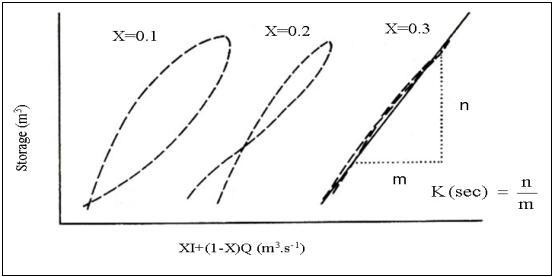
| K | the storage time constant for the river reach, with a value close to the wave travel time within the river reach [s] |
| X | a weighting factor varying between 0 and 0.5 [dimensionless] |
By combining Equations 2.1 and 2.2, the basic Muskingum equation is attained as given in Equations 2.3a and 2.3b:
where
| St | temporary channel storage [m3] at time t |
|---|---|
| Sp | prism storage at time t |
| Sw | wedge storage at time t |
When X = 0, Equation 2.3 simplifies to St = KQt, indicating that storage is solely dependent on outflow. When X = 0.5, equal weight is given to inflow and outflow, resulting in a condition akin to a uniformly progressive wave that does not attenuate (US Army Corps of Engineers, 1994a). Thus, 0.0 and 0.5 serve as limits for the value of X, determining the degree of attenuation of a flood wave within this range as it passes through the routing reach (US Army Corps of Engineers, 1994a).
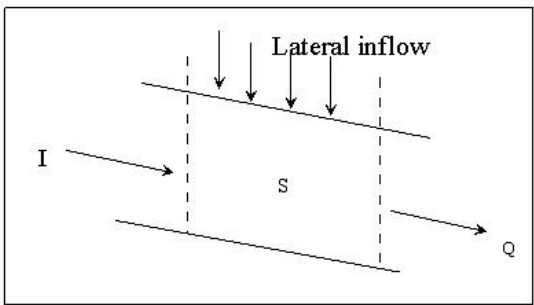
Fread (1993) explained that an oversimplified depiction of unsteady flow along a routing reach may be seen as a lumped process, wherein the inflow at the upstream end and the outflow at the downstream end of the reach vary with time. In Muskingum flood routing, it is assumed that the storage in the system at any moment is proportionate to a weighted average of inflow and outflow from a given reach (Bauer, 1975).
According to the continuity equation (Equation 2.4), the rate of change of storage in a channel over time equals the difference between inflow and outflow (Shaw, 1994):
where
| ΔSt/Δt | the rate of change of channel storage with respect to time |
|---|
The combination and solution of Equations 2.3 and 2.4 in finite difference form yield the well-known Muskingum flow routing equations as presented in Equations 2.5 and 2.6.
where
| Qjt | outflow at time t of the jth sub-reach |
|---|---|
| Ijt | inflow at time t of the jth sub-reach |
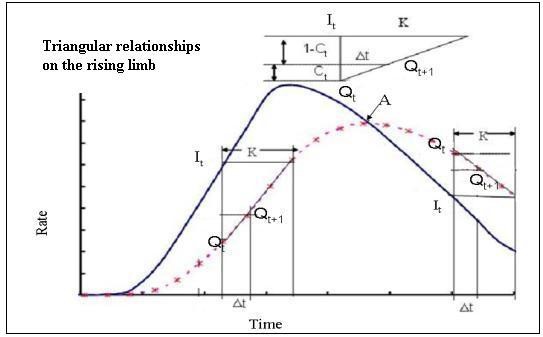
Here, C0, C1, and C2 represent coefficients determined by functions of K, X, and a discretized time interval Δt. The sum of C0, C1, and C2 equals one, so once C0 and C1 are calculated, C2 can be derived as 1 - C0 - C1. Consequently, the outflow at the end of a time step is the weighted sum of the initial inflow and outflow, as well as the final inflow (Shaw, 1994). These three coefficients remain constant throughout the routing process (Fread, 1993).
As suggested by Viessman et al. (1989), it is important to avoid negative values for C1. This is ensured when Equation 2.7 is satisfied. Negative values of C2, however, do not impact the hydrographs routed during flooding (Viessman et al., 1989).
The time Δt is called the routing period and it must be chosen sufficiently small such that the assumption of flow rate linearity over time interval Δt is approximated (Gill, 1992). In particular, if Δt is too large, the peak of the inflow curve may be missed, so the period should be kept smaller than 1/5 of the travel time of the flood peak through the reach (Wilson, 1990). According to Viessman et al. (1989), theoretical stability of the numerical method is accomplished if Equation 2.8 is fulfilled: